![]()
![]()
![]()
![]()
![]()
![]()
![]()
The robot is driven by two Maxon 2332.964-12.216-200 motors (Data sheet here). This motors were selected for the size, power and quality. The diagram below details the full spec's:
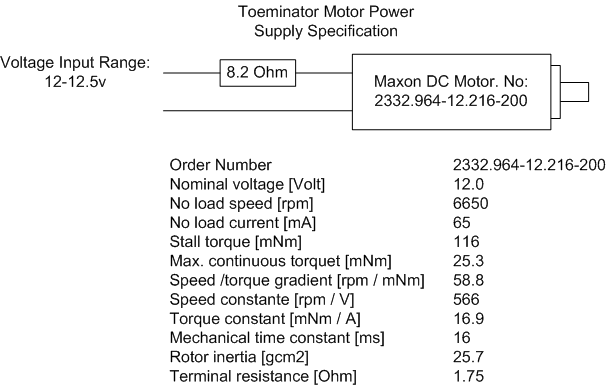
Figure 1.
The attached ear box reduces the output to RPM to 40 which, given the size of the wheels, gives the robot a maximum speed of 0.28m/S (28cm/S). Although the motors are not set to run flat out, this gives the robot some room for additional power, if needed - i.e. thicker carpet etc.
The motors are driven via LMD18200 PWM units, where the MPU has control over the PWM frequency and the motor direction. The brake facility is not used. The period frequency for these was chosen to be 1KHz,
Stall Current
To prevent the motors burning out when the wheels are stalled a 8.2 Ohm resistor is put in series with one motor terminal. This will dissipate the power in the event of a stall.
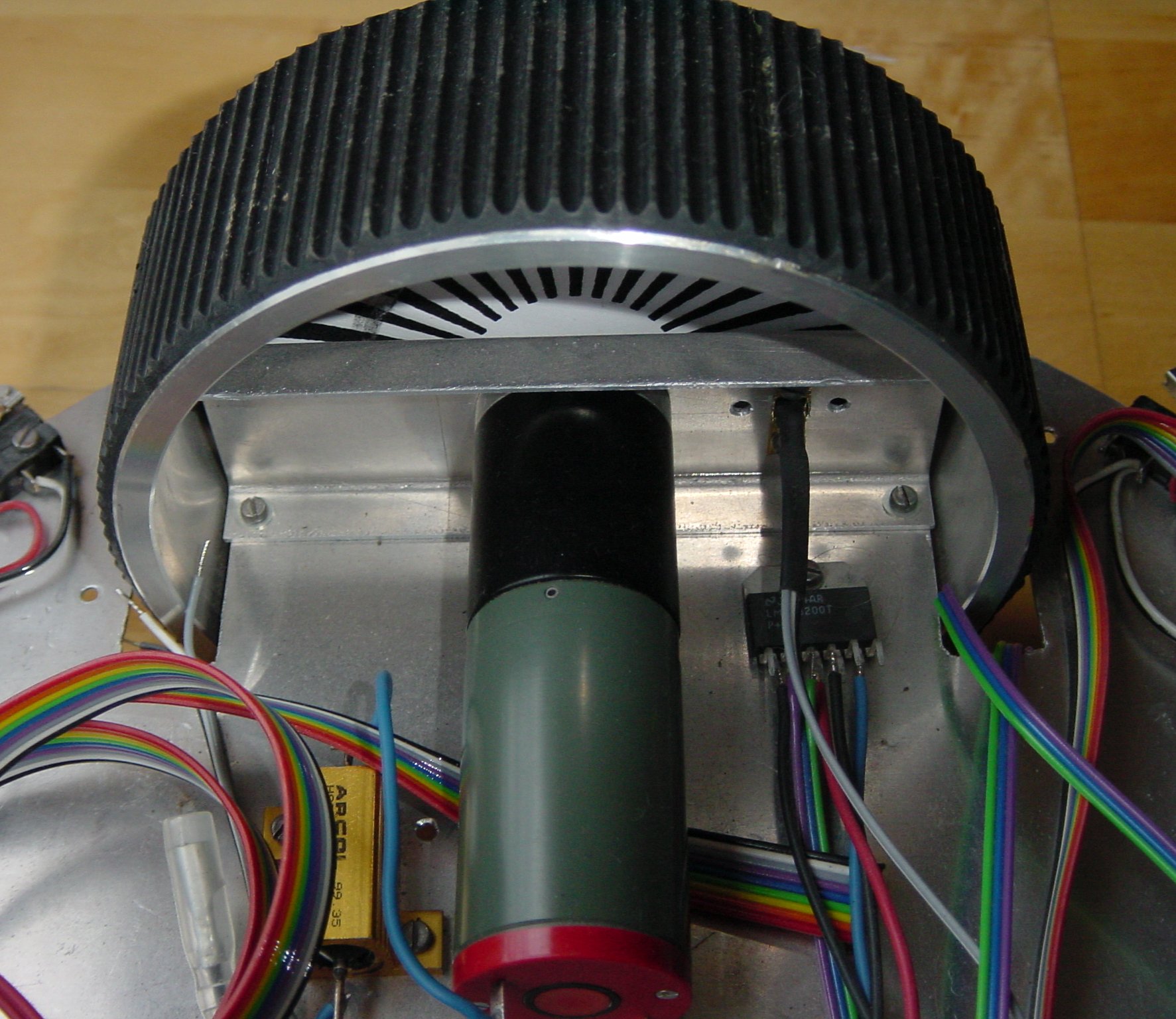
The photo below shows the motor, motor driver IC (LMD18200) and power resistor mounted in the chassis.