![]()
![]()
![]()
![]()
![]()
![]()
![]()
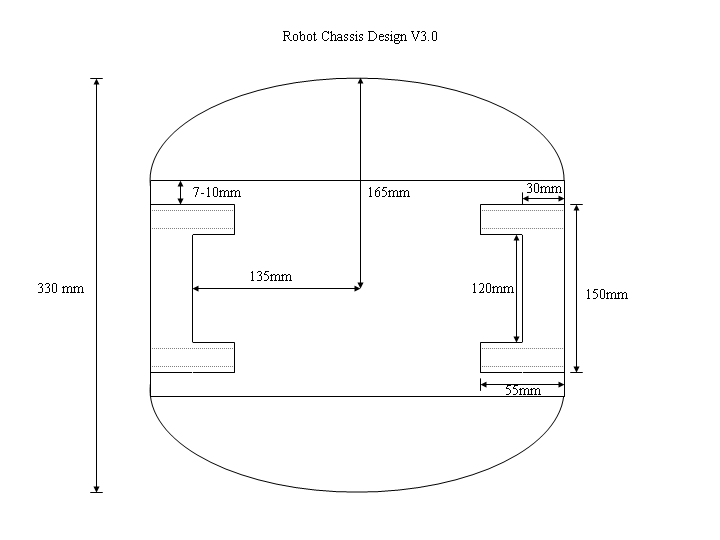
The robot's max dimensions are 32cm x 32cm (At the outermost edges of the bump skirts), tipping the scales at just under 5Kg. It was designed as a near circle as this is a good shape to get through most obstacles.
The robot's chassis is built out three cut layers of 1mm aluminium sheet, and two aluminium motor brackets. These sheets are spaced apart using 4 steel threaded rods running straight through the robot.
There are four 2mm aluminium bump skirts all the way around the outside of the robot to ensure no object gets missed - hopefully!
The bump skirt mounting brackets are chrome plated 1mm folded steel sheets, to give extra strength and attached to the main chassis with 2mm folded aluminium brackets.
The wheels are again aluminium, but machined from a solid rod. The wheels were solid, but to save one weight and more importantly to make the wheels slide over the chassis there were drilled out and machined out on the inside. Figure 1 shows the dimensions of the wheels, and figure 2 the drive layout.
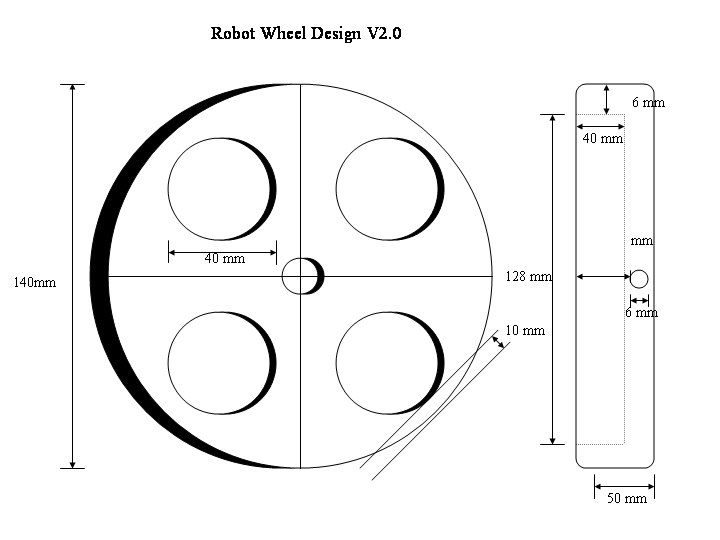
Figure 1
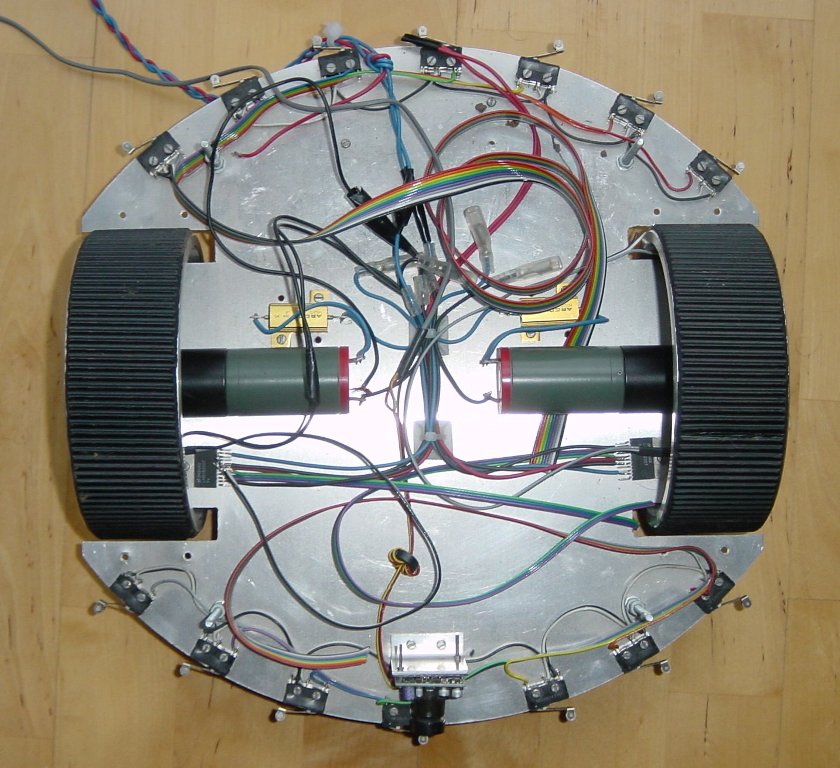
Figure 2
A spaghetti of wire every where. The picture below shows how the layers of the robots chassis are stacked up on the motor mounting brackets and the steel rods holding the chassis layers together. It also shows how the bottom layers of the chassis are cut to accommodate the wheels being mounted within the robots edges.
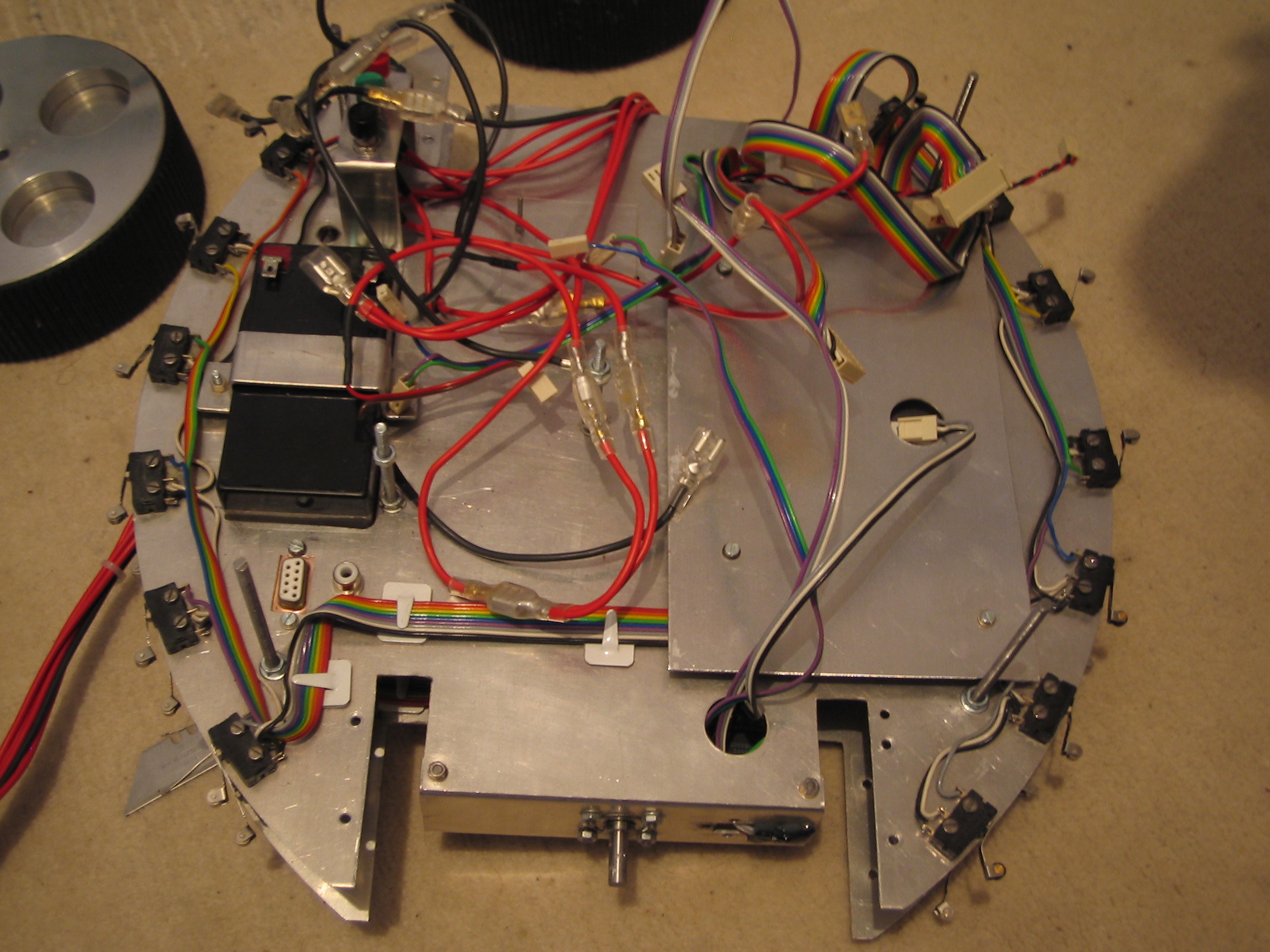
(This is a slightly older picture where the battery was yet to be upgrade to the NiMH type now used)
Below is the chassis dimensions diagram: