![]()
![]()
![]()
![]()
![]()
![]()
![]()
The robot is powered by 10 1.2v 3000mAh Sanyo NiMH batteries.
The original battery was a 12v YASA 1.2Ah battery, however this only allowed the robot a short run time and took a while to recharge.
In tests this has enough power to run the robot for 3 hrs continuous use with all systems (MPUs, Motors, RF Transmitter and the AV system) powered up. Given the characteristics of a NiMH battery it means that the robot run for as long as possible before the voltage drops below 12v, the point at which the LMD18200 PWM controllers start to fail (The MPUs will keep running for quite a while longer.
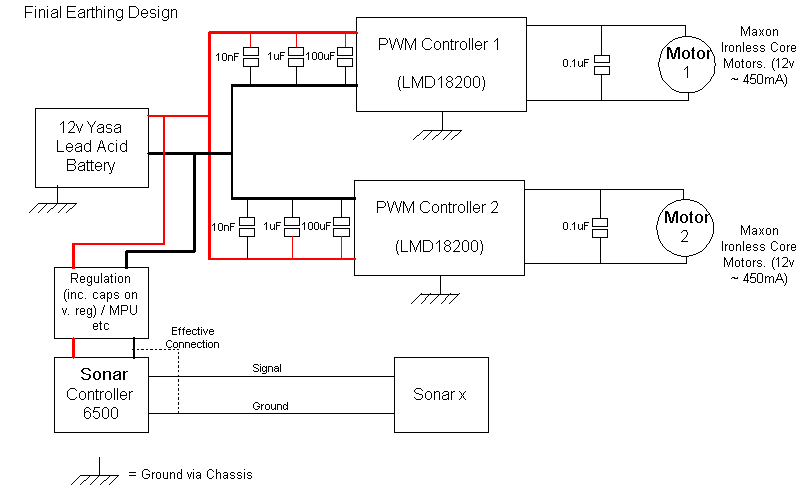
Ground Loops - During construction there were a number of problems with grounding loops, which caused the sensors to give false readings (Specifically the sonar's). To prevent this problem the following diagram shows how cirsuits paths back to ground only had one route.
Currently the battery voltage is monitored by the AVR MPU, however this is just informational data. It could be used, in addition to some additional sensors, to seek out a charging station when the level drops below a specified threshold.