![]()
![]()
![]()
![]()
The host control system's purpose it to allow the robot to communicate with a PC. The reasons for this are:
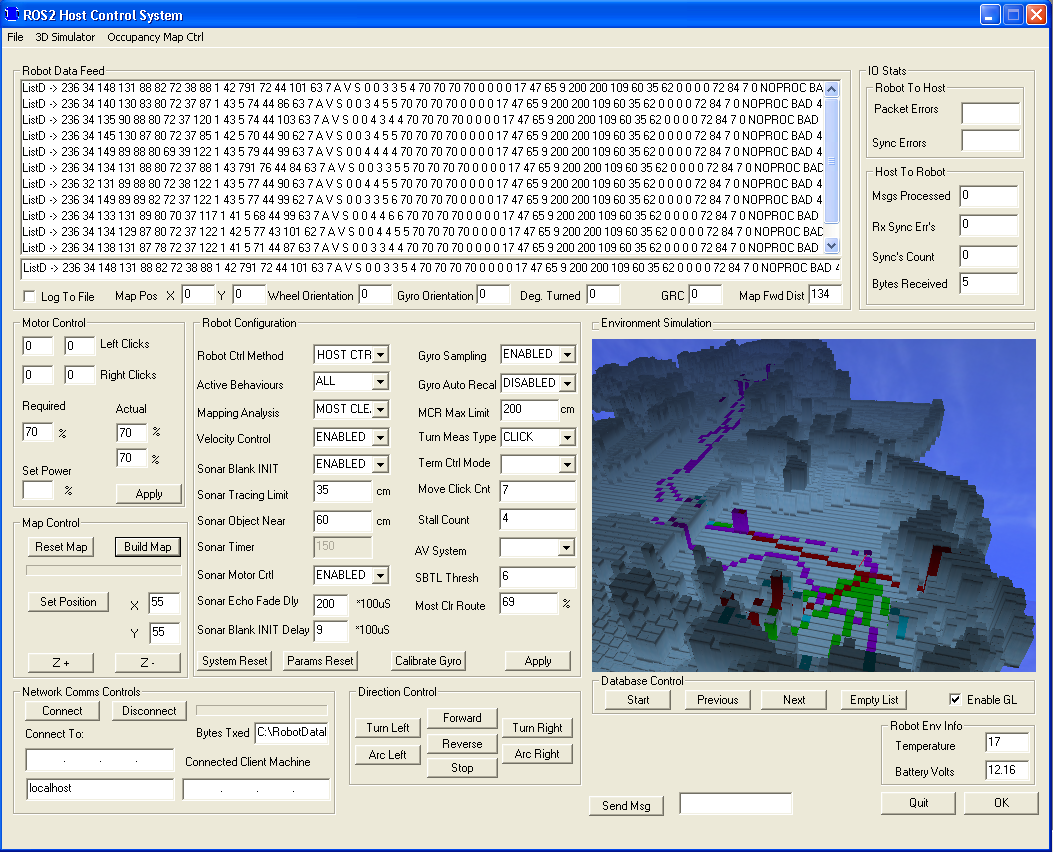
The HCS also has an environment simulator (Which I've written using OpenGL), that creates a 3D model of the data from the robot. This means that it makes it easy to see whether the data being sent back makes sense and is visualise how the robot perceives its environment.
Below is a screen shot of the HCS, shows the various ways it can be used to control the robot.