The first autonomous robot I built...
A lot of lessons were learnt here before I started working on the toeminator.
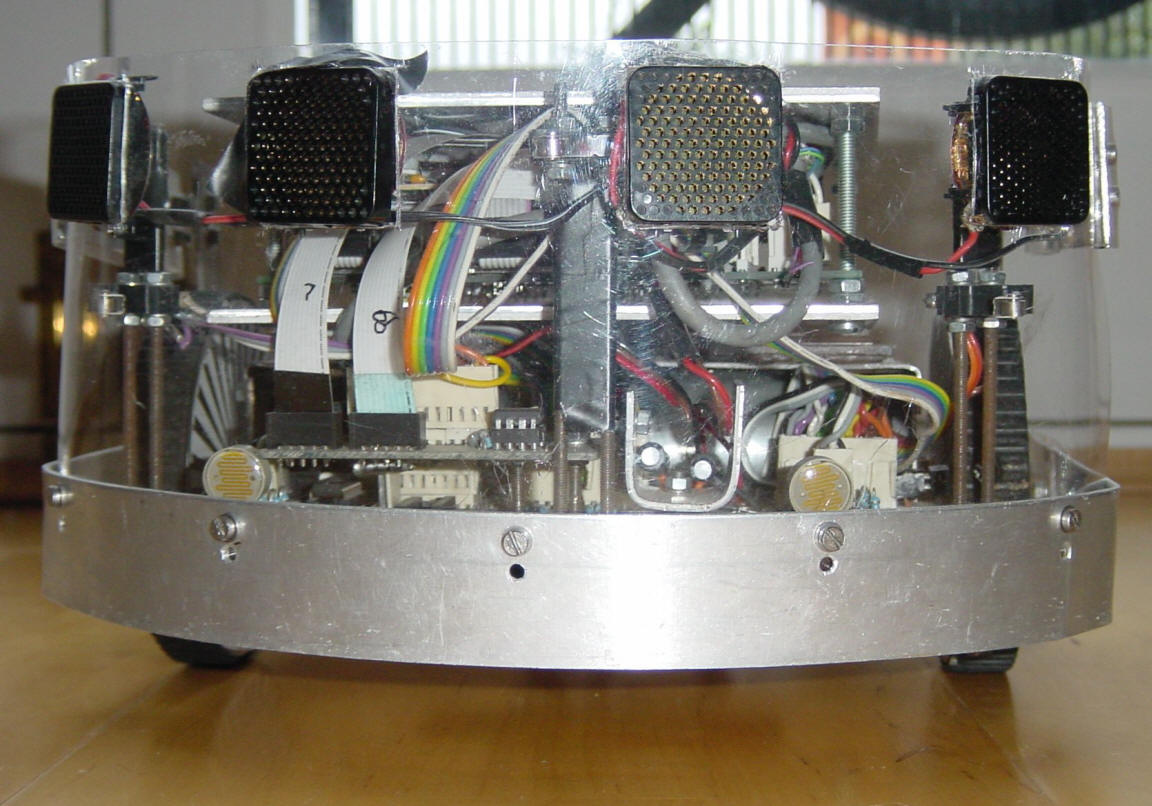
On of the most important differences was with the sonar....the range finders on this bot don't work as well as the do on the toeminator. It's rather expensive in that there are 2x 6500 rangefinders driving two parallel transducers. This has the advantage that it's easy to get sonar coverage over a given area, however this is out weighted by the disadvantages:
Cost - to buy and the number of I/O lines taken up on the MPU.
Inaccurate - You never know exactly where the reflection came from.